PAC advance 电机使用指南
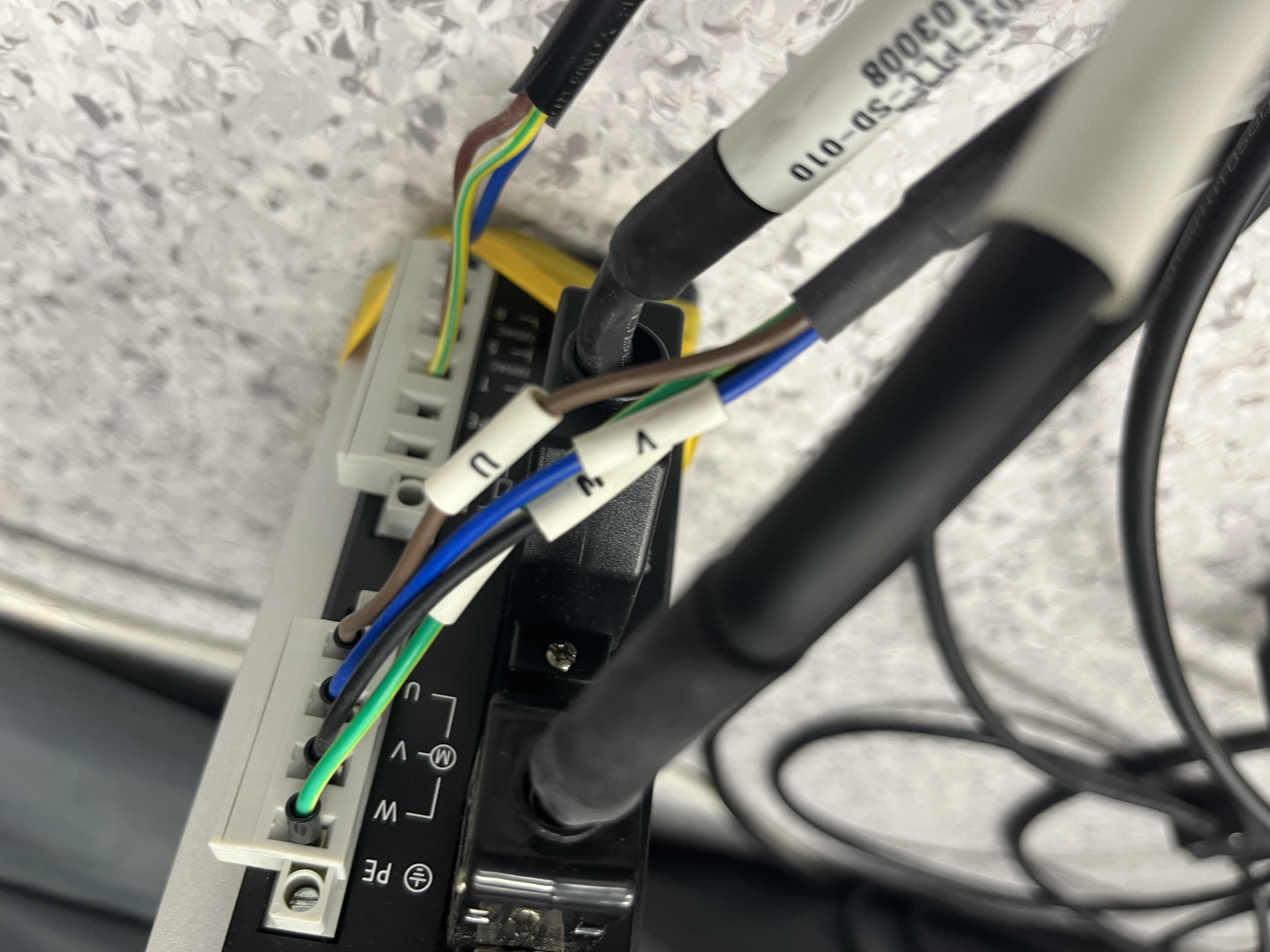
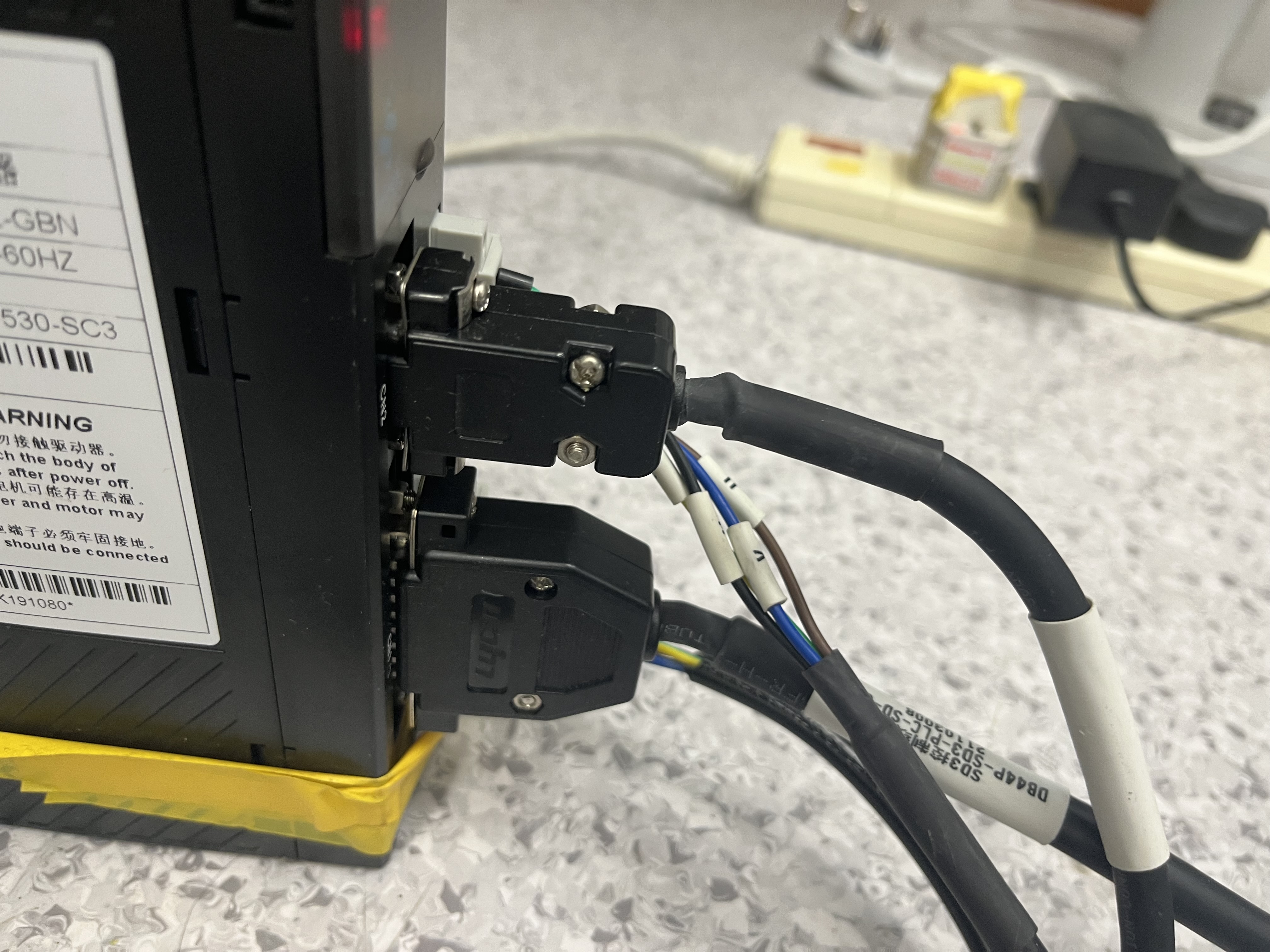
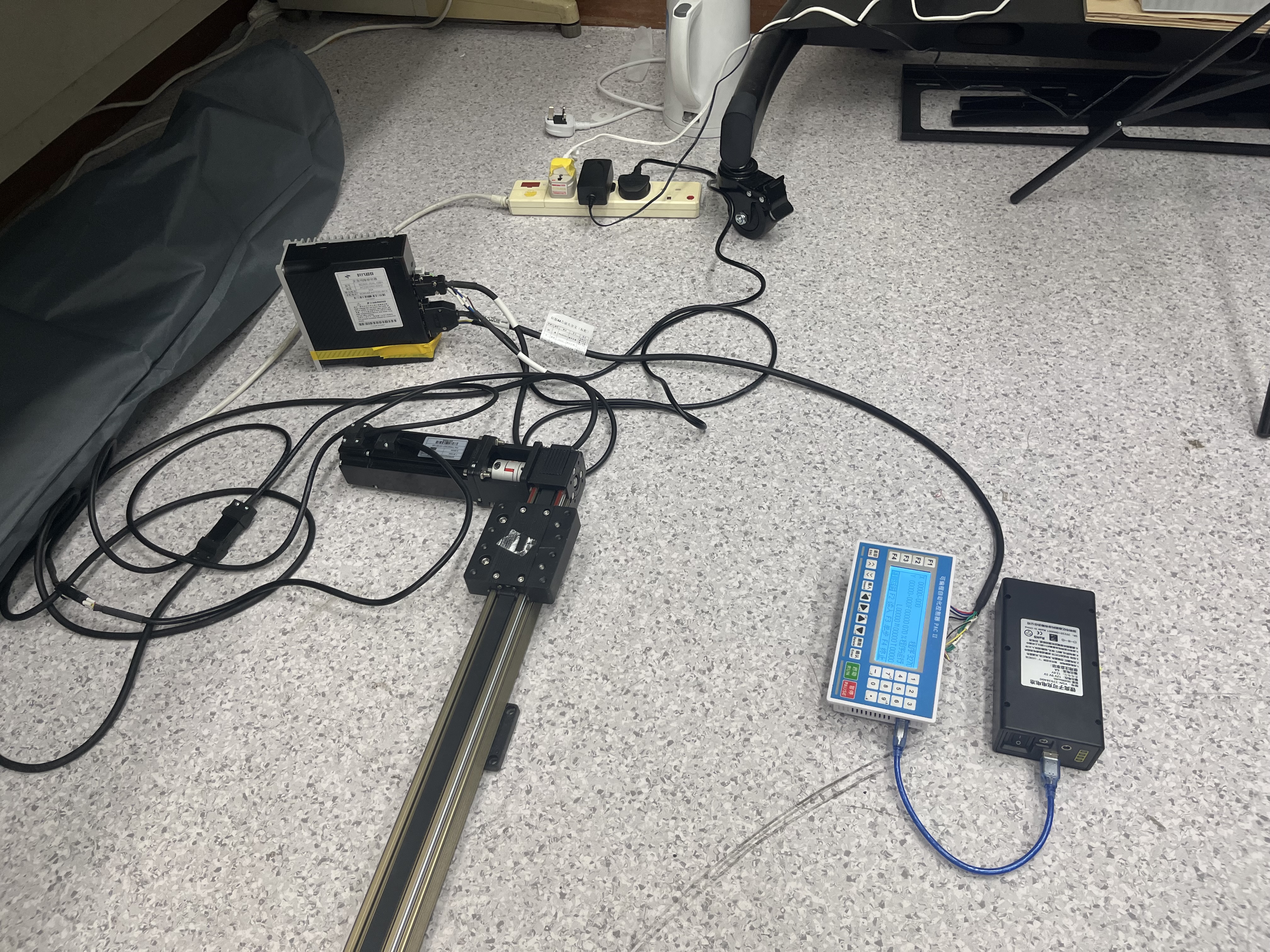
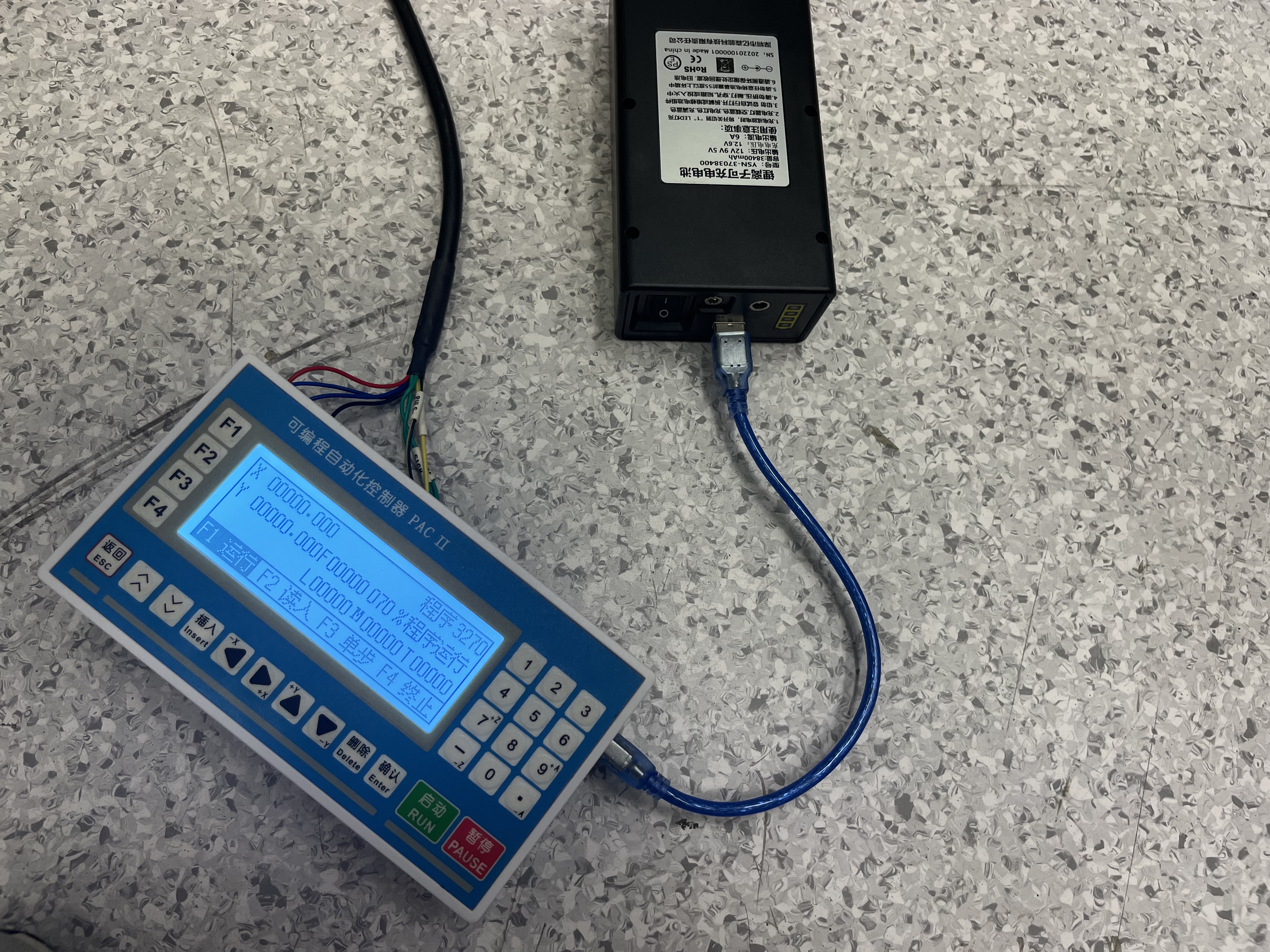
整体连接






初始化
首先要初始化调零(即滑块在初始位置时,显示屏上的坐标也在初始位置)

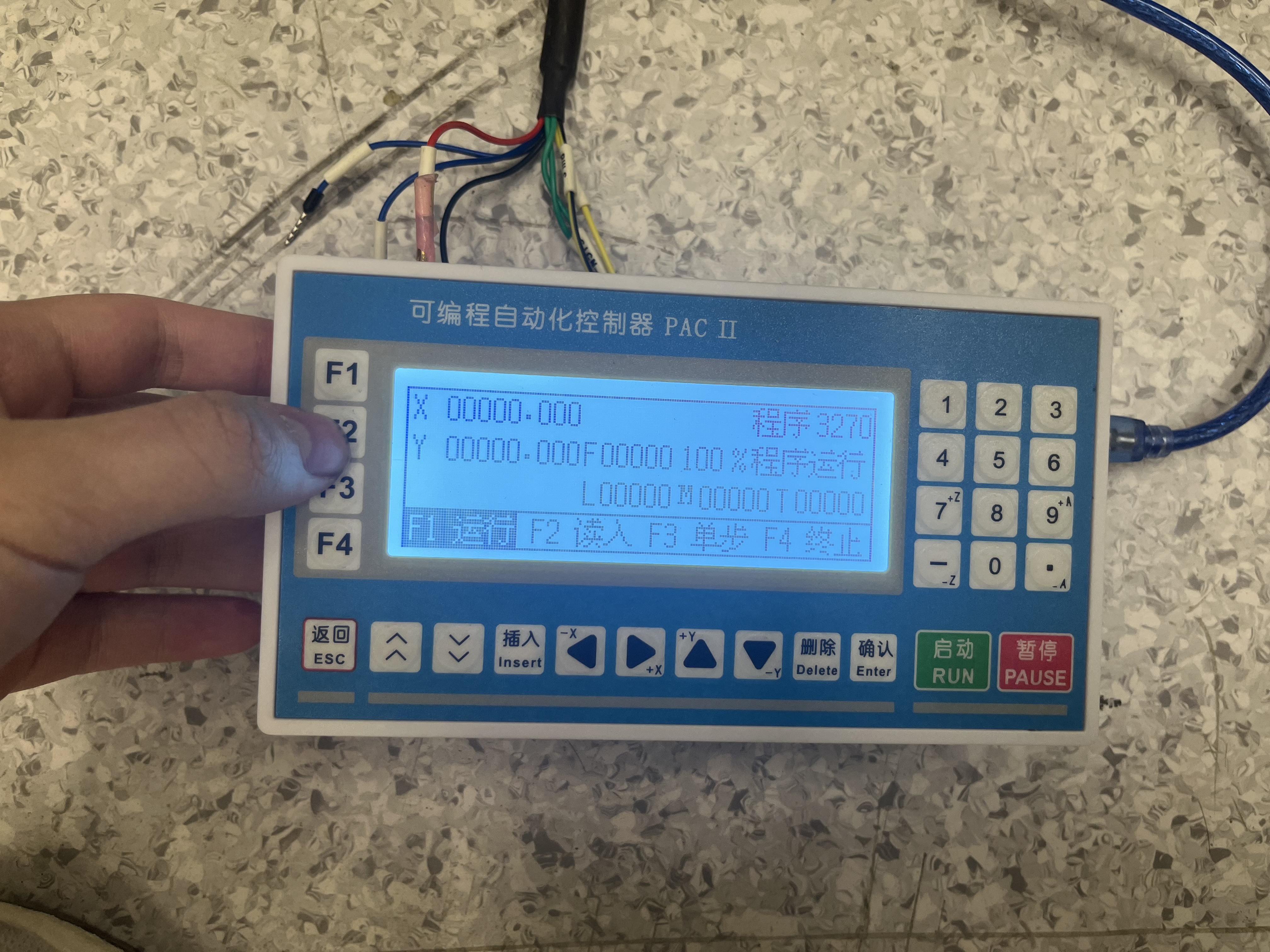
先返回(左下角),进入手动(F2)模式。
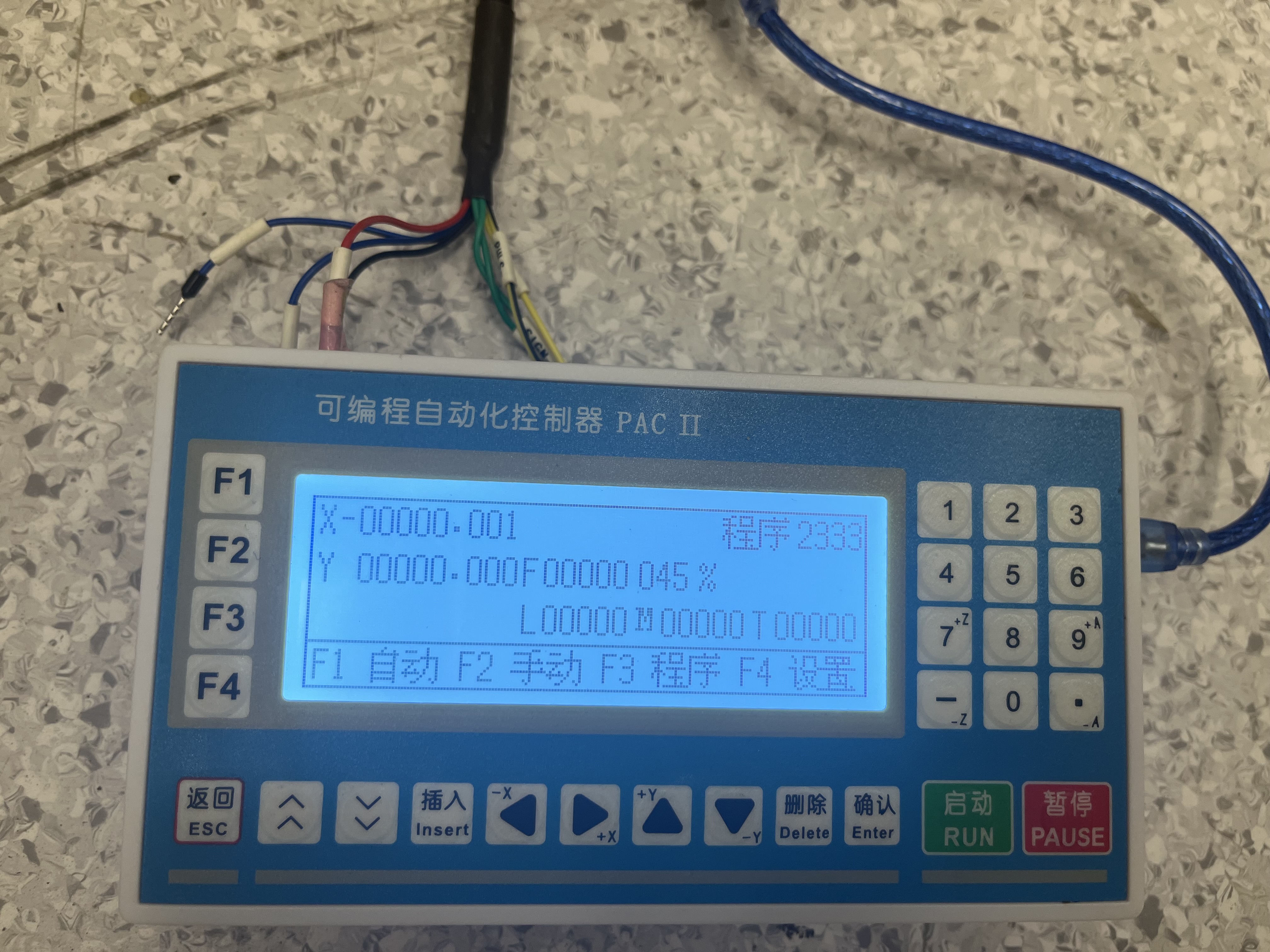
可以选择高速(F1)或微步(F2)模式。选择相应的坐标轴左右调整(注意正负)。直到滑块到达零点位置。
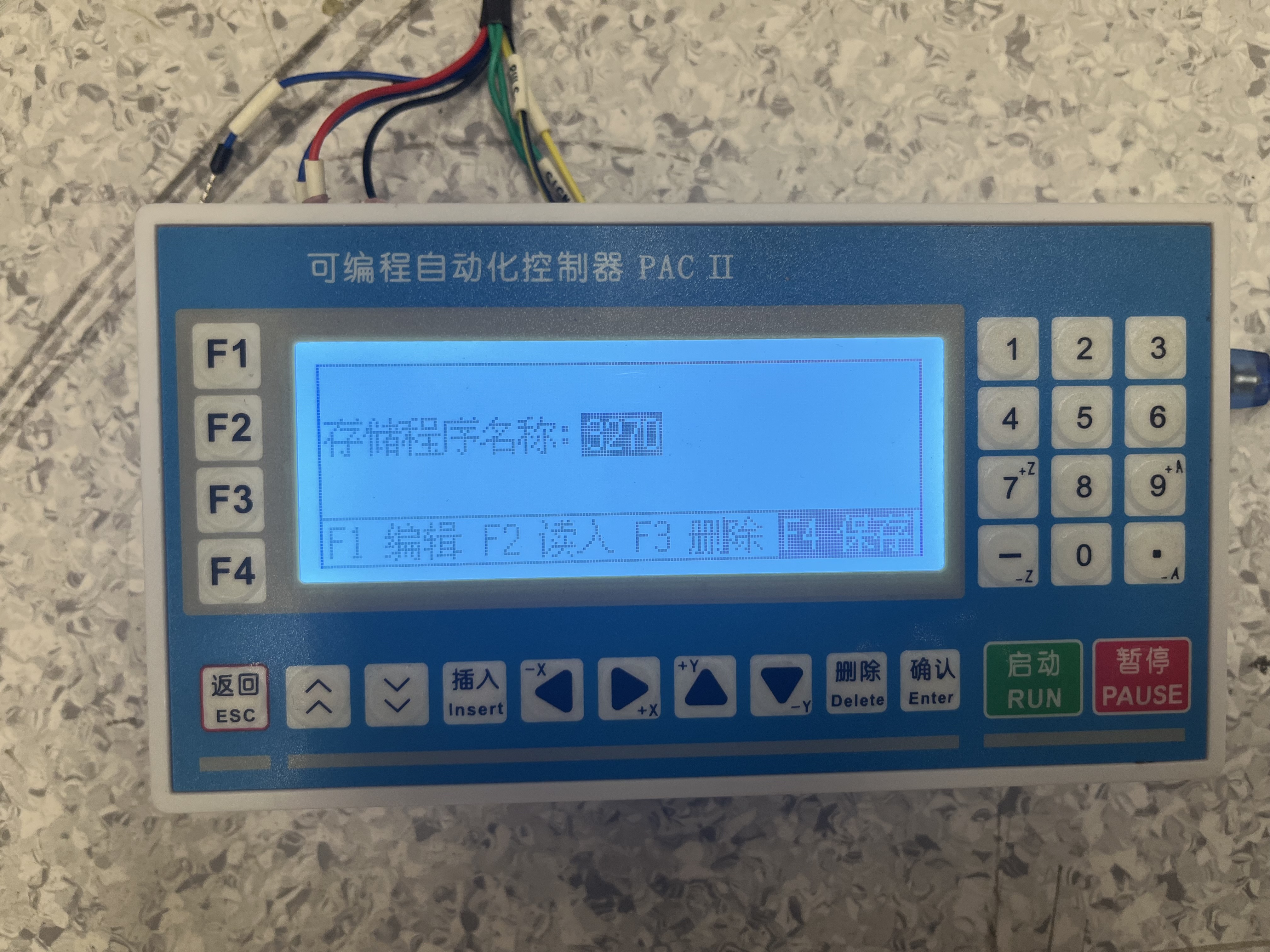
**之后,拔掉数据线。**选择程零(F3),可以看到显示屏上的数字被手动调整为0。
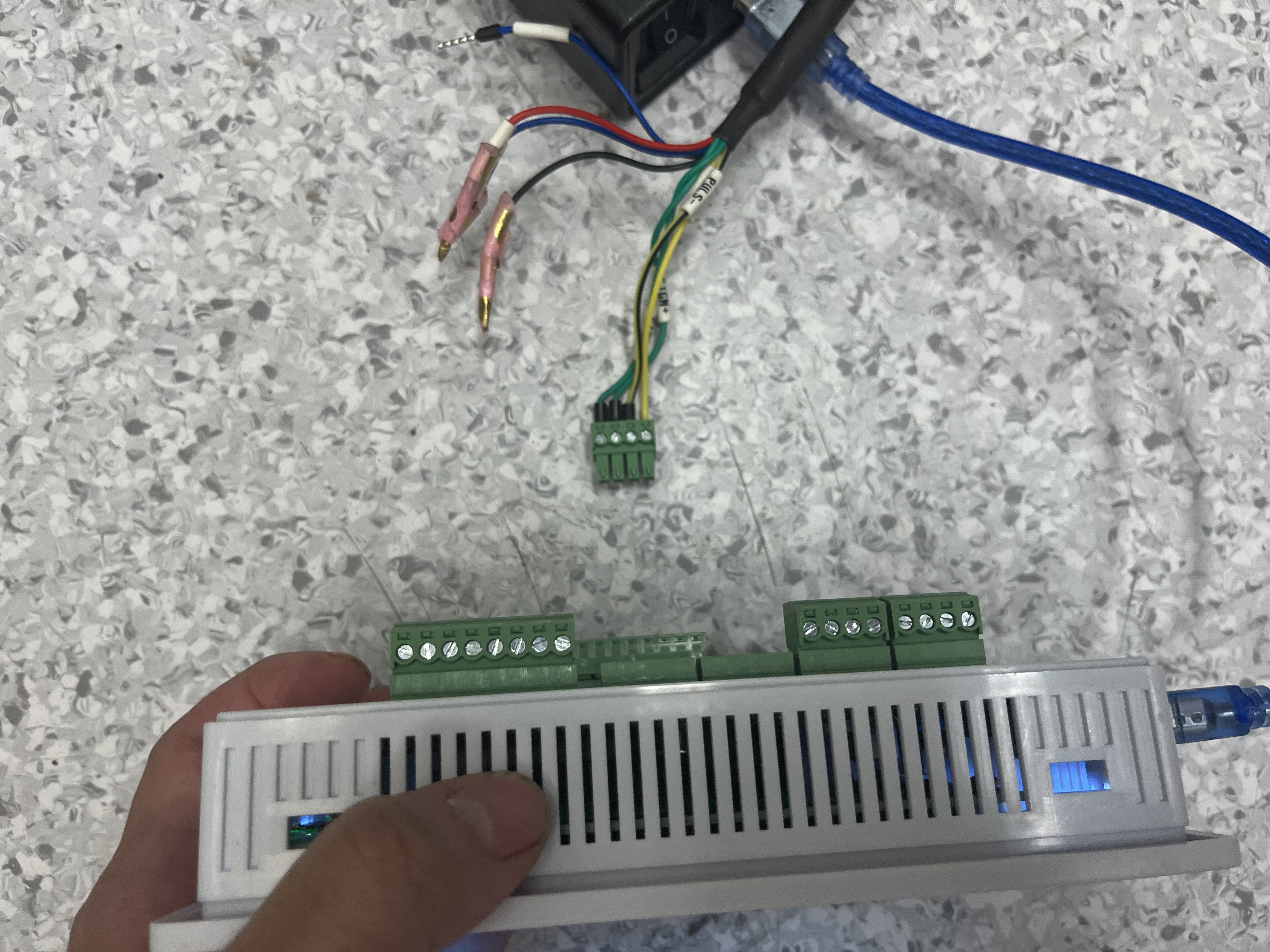
最后再插上数据线。
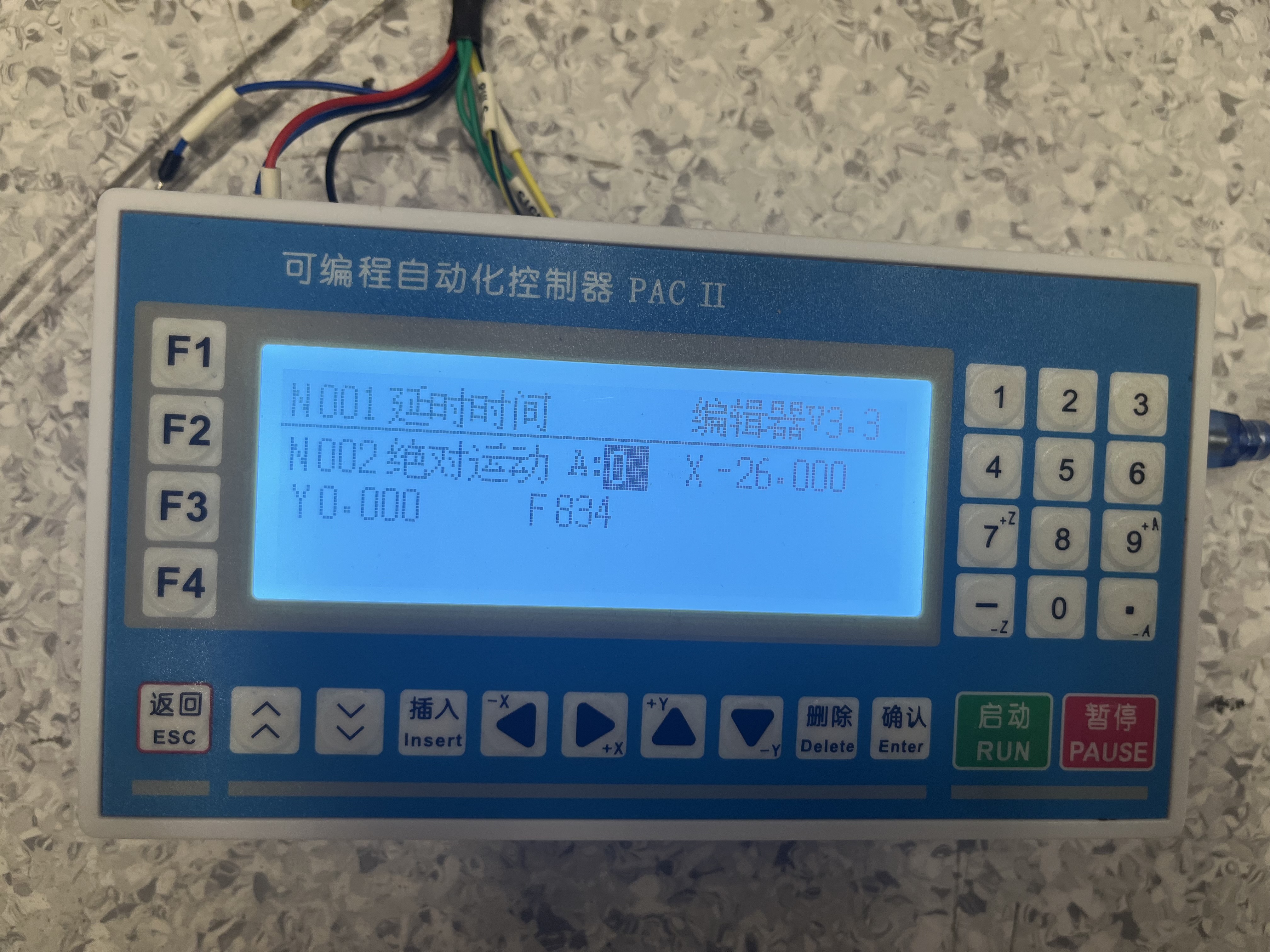
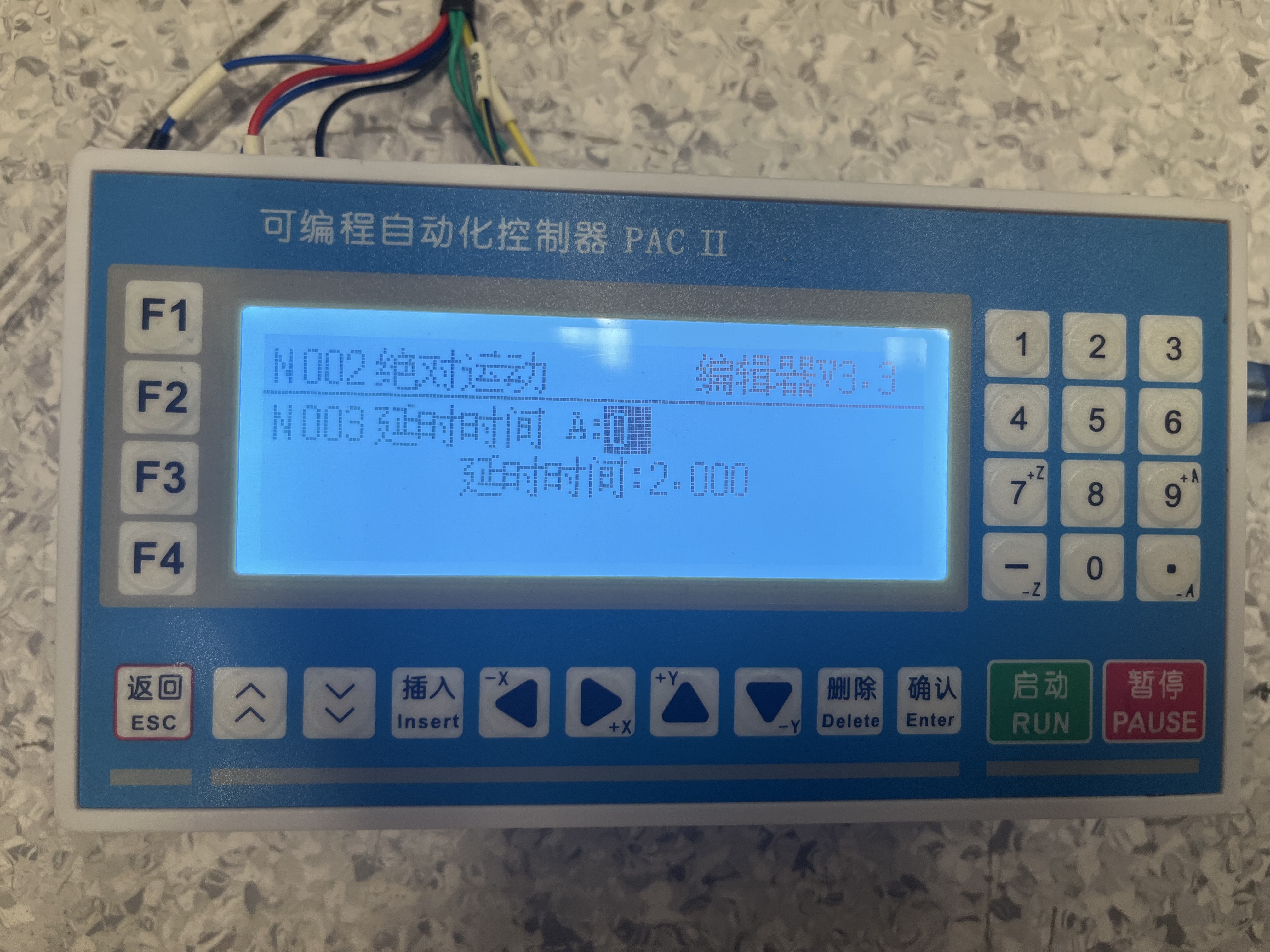
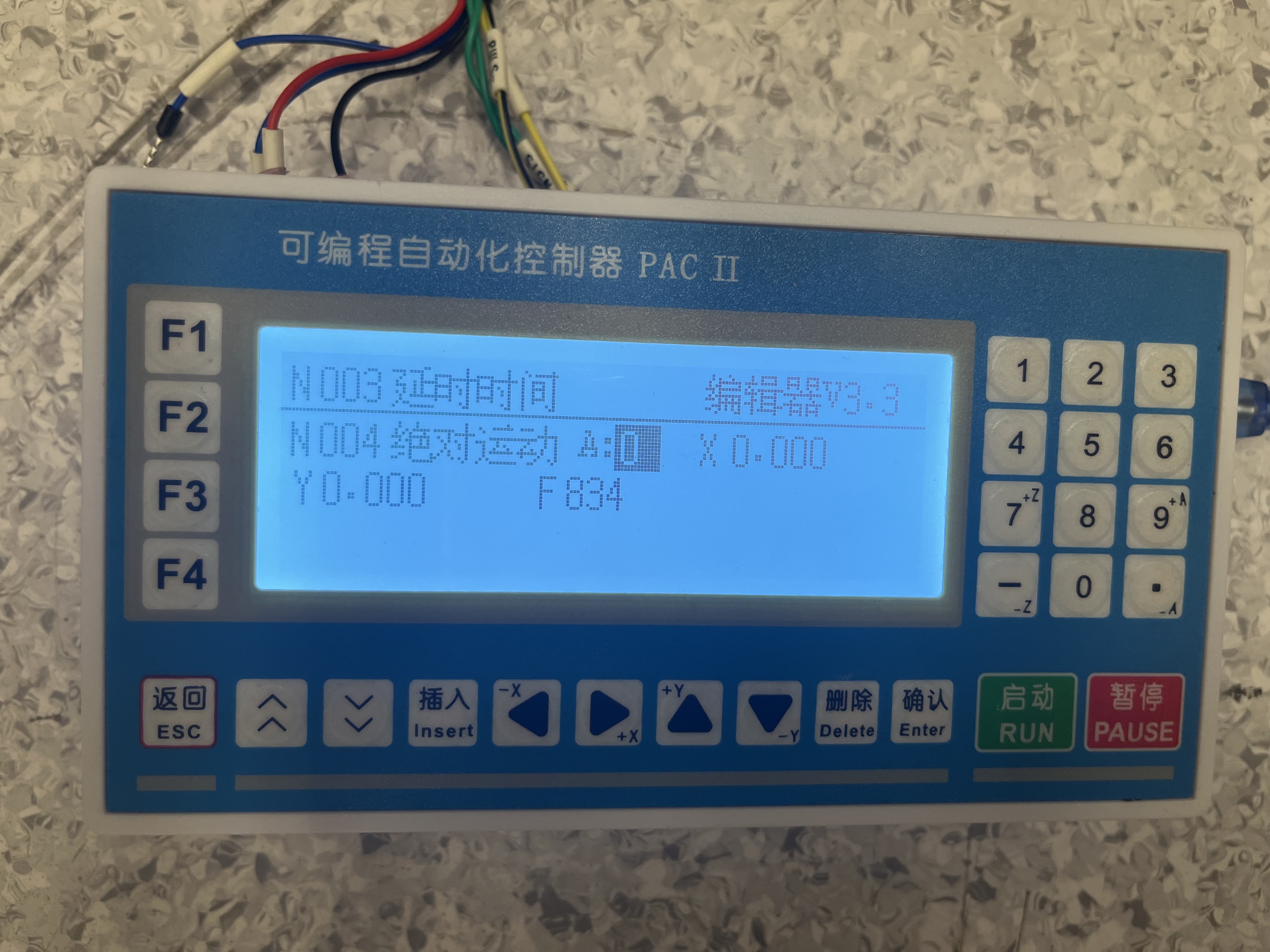
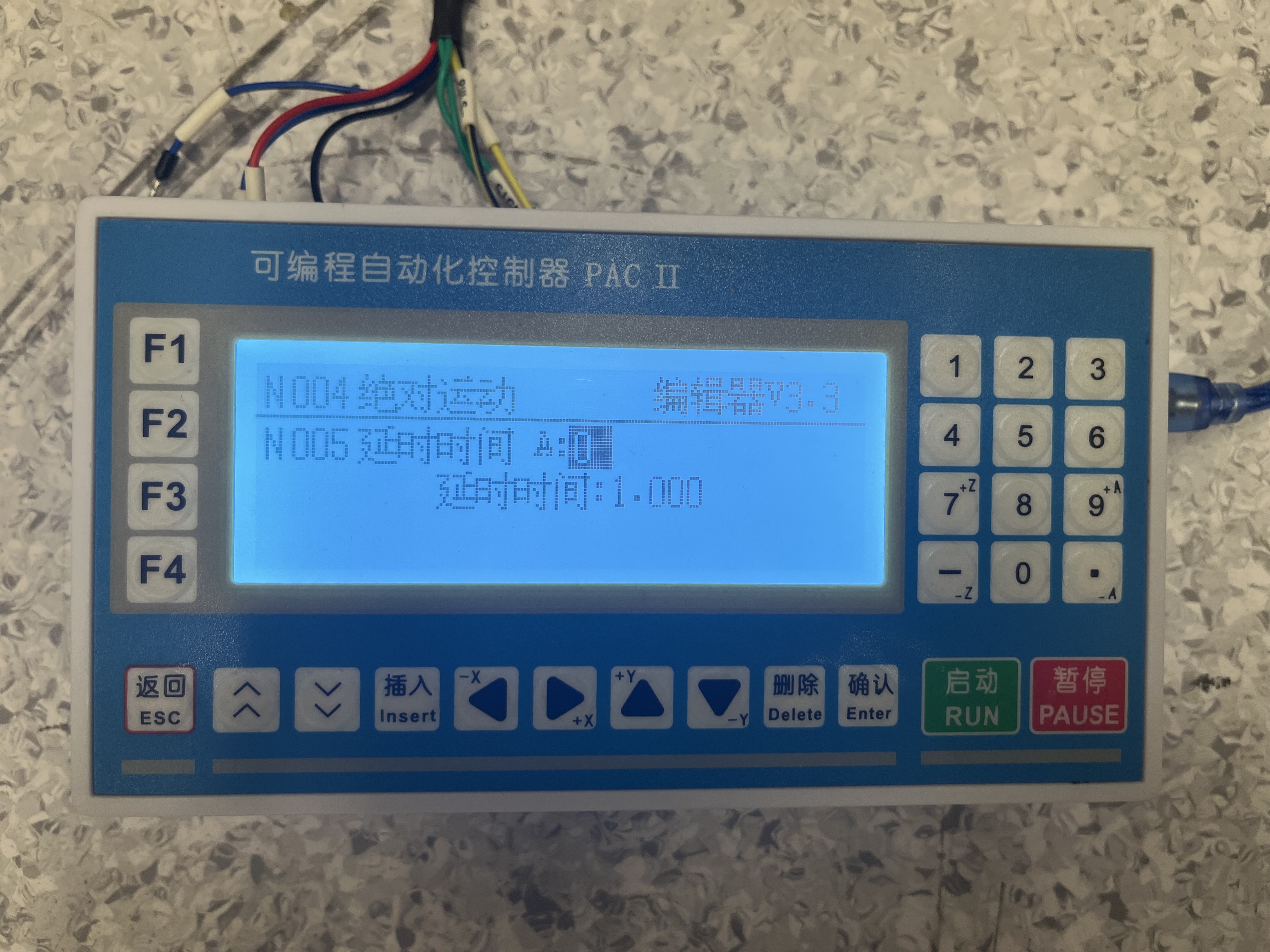
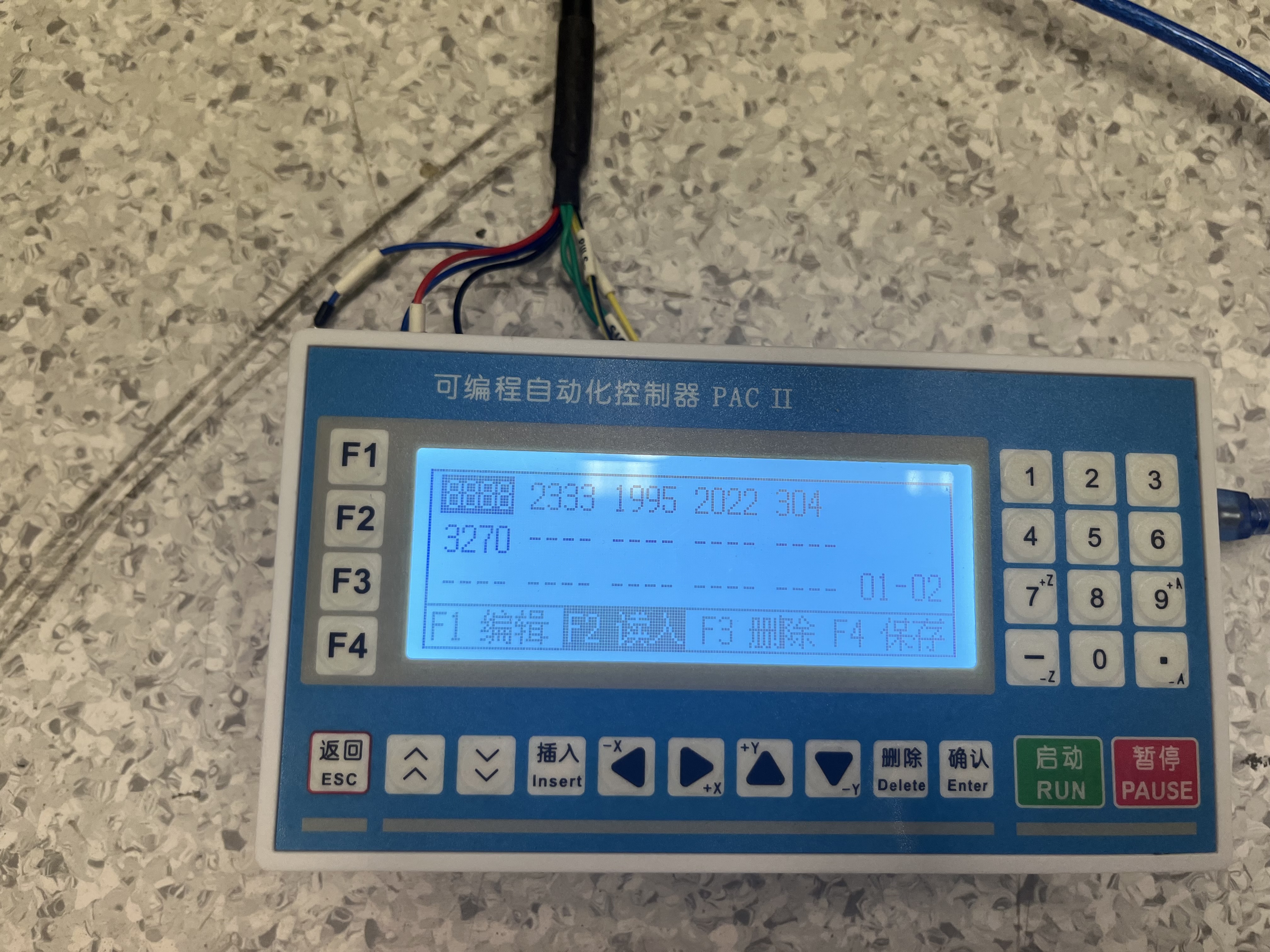
电机编程流程
整体流程:初始化基准点 → 绝对位置(3.4,设置到终点)→ 延时(3.6)→ 绝对位置(回到起点)→ 设置循环(3.9)
$$ v = \frac{L \cdot F}{60} $$
如果设置$F=833$,则速度
$$ v|_{F=834} = \frac{1.2 \times 833}{1000} = 1 : m/s $$
返回